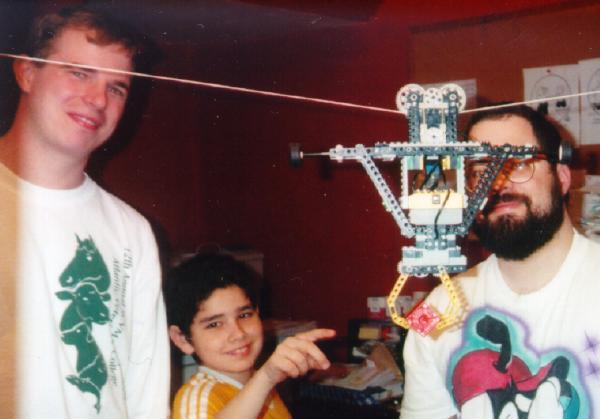
The TramBot—When my nephew Dave Matheson (a veterinary grad student at Prince Edward Island) stopped in for a day-long visit, we constructed a TramBot that ran on a string stretched across an upstairs room with a light-activated set of “grabsâ€â€”perfect for bombing runs. This was inspired by the “Bomber Fly†seen in assorted Lego media.
 Yes, I Always Over-Design
Yes, I Always Over-Design
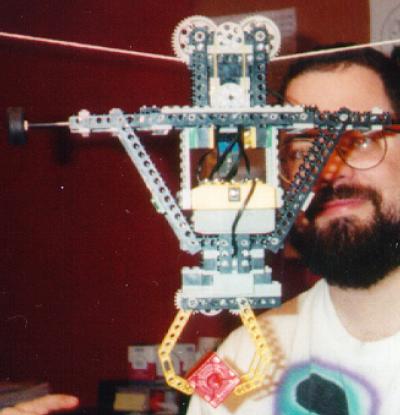
If you’ve seen the Bomber Fly in the Lego publications, then you will immediately notice that my creation is much bigger, and probably heavier. I developed a fear of minimalism after my very first RIS creation quite literally shook itself to pieces in under 10 seconds.
Features and Innovation Details
- The forward-reverse pulleys are driven by a belt drive, although a geared drive would have been fine in this case.
- There are bumpers connected to touch sensors on each end that reverse the drive pulley motor when triggered. Because the string is at about a 45º angle to the wall, we added the tires to keep the bumper rods from slipping. (Before this was done, the bumpers would sometimes just glance off the wall without triggering the touch sensors, as the robot tried to keep moving.)
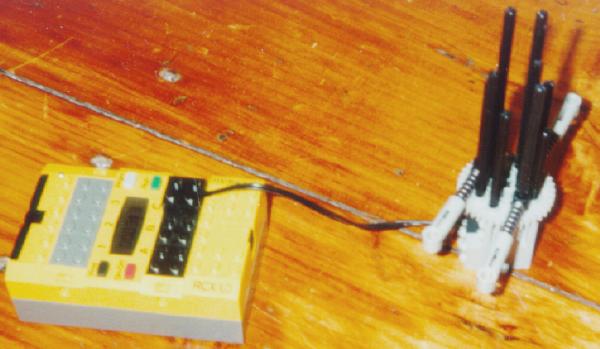
- We solved the problem of timing on the “grabs†(the name alludes to Gerry Anderson’s Supermarionation Thunderbirds program—see https://www.gis.net/~fm/) by using a belt drive, and setting the motor run time to one second longer than the absolute maximum necessary. This allowed the grabs to automatically re-synchronize, be movable by hand, and grip objects of various sizes.
- The grabs are light-triggered. We used the Lego light sensor, and programmed it so that a flashlight beamed on it would trigger the grabs’ open or close sequence. This allowed for precise payload delivery.

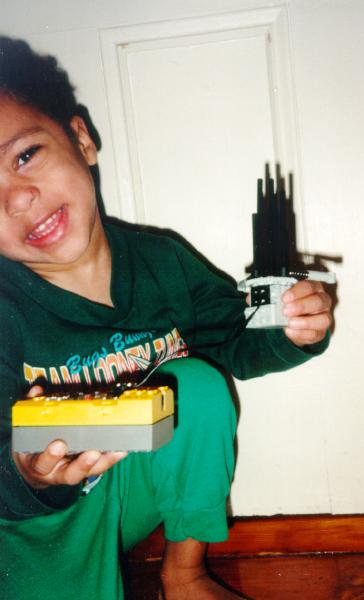
My sons Isaac and John, my Nephew Dave, and I perform some final adjustments and testing.
To Boldly Go …